
引言
深度残差网络(Deep residual network,ResNet)的提出是CNN图像史上的一件里程碑事件,让我们先看一下ResNet在ILSVRC和COCO 2015上的战绩:
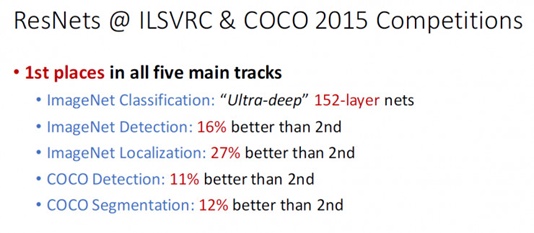
图1 ResNet在ILSVRC和COCO 2015上的战绩
ResNet取得了5项第一,并又一次刷新了CNN模型在ImageNet上的历史:
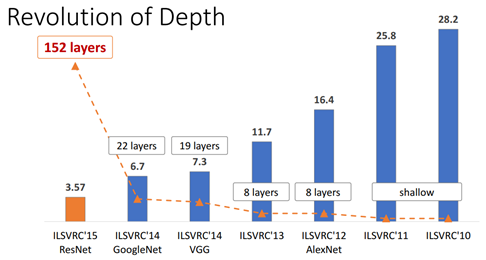
图2 ImageNet分类Top-5误差
ResNet的作者 何凯明 也因此摘得CVPR2016最佳论文奖,当然何博士的成就远不止于此,感兴趣的可以去搜一下他后来的辉煌战绩。那么ResNet为什么会有如此优异的表现呢?其实ResNet是解决了深度CNN模型难训练的问题,从图2中可以看到14年的VGG才19层,而15年的ResNet多达152层,这在网络深度完全不是一个量级上,所以如果是第一眼看这个图的话,肯定会觉得ResNet是靠深度取胜。事实当然是这样,但是ResNet还有架构上的trick,这才使得网络的深度发挥出作用,这个trick就是残差学(Residual learning)。下面详细讲述ResNet的理论及实现。
深度网络的退化问题
从经验来看,网络的深度对模型的性能至关重要,当增加网络层数后,网络可以进行更加复杂的特征模式的提取,所以当模型更深时理论上可以取得更好的结果,从图2中也可以看出网络越深而效果越好的一个实践证据。但是更深的网络其性能一定会更好吗?实验发现深度网络出现了退化问题(Degradation problem):网络深度增加时,网络准确度出现饱和,甚至出现下降。这个现象可以在图3中直观看出来:56层的网络比20层网络效果还要差。这不会是过拟合问题,因为56层网络的训练误差同样高。我们知道深层网络存在着梯度消失或者爆炸的问题,这使得深度学习模型很难训练。但是现在已经存在一些技术手段如BatchNorm来缓解这个问题。因此,出现深度网络的退化问题是非常令人诧异的。
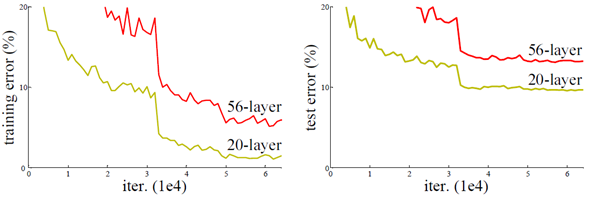
图3 20层与56层网络在CIFAR-10上的误差
残差学习
深度网络的退化问题至少说明深度网络不容易训练。但是我们考虑这样一个事实:现在你有一个浅层网络,你想通过向上堆积新层来建立深层网络,一个极端情况是这些增加的层什么也不学习,仅仅复制浅层网络的特征,即这样新层是恒等映射(Identitymapping)。在这种情况下,深层网络应该至少和浅层网络性能一样,也不应该出现退化现象。好吧,你不得不承认肯定是目前的训练方法有问题,才使得深层网络很难去找到一个好的参数。
这个有趣的假设让何博士灵感爆发,他提出了残差学习来解决退化问题。对于一个堆积层结构(几层堆积而成)当输入为 $\displaystyle x$ 时其学习到的特征记为 $\displaystyle H(x)$ ,现在我们希望其可以学习到残差 $\displaystyle F(x)=H(x)-x$,这样其实原始的学习特征是 $\displaystyle F(x)+x$ 。之所以这样是因为残差学习相比原始特征直接学习更容易。当残差为0时,此时堆积层仅仅做了恒等映射,至少网络性能不会下降,实际上残差不会为0,这也会使得堆积层在输入特征基础上学习到新的特征,从而拥有更好的性能。残差学习的结构如图4所示。这有点类似与电路中的“短路”,所以是一种短路连接(shortcut connection)。
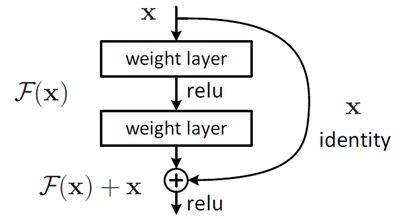
图4 残差学习单元
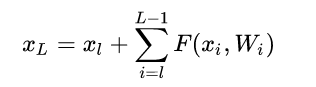
为什么残差学习相对更容易,从直观上看残差学习需要学习的内容少,因为残差一般会比较小,学习难度小点。不过我们可以从数学的角度来分析这个问题,首先残差单元可以表示为:
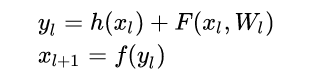
其中 $\displaystyle x_{l}$ 和 $\displaystyle x_{l+1}$ 分别表示的是第 $\displaystyle l$ 个残差单元的输入和输出,注意每个残差单元一般包含多层结构。 $\displaystyle F$ 是残差函数,表示学习到的残差,而$\displaystyle h(x_{l})=x_{l}$ 表示恒等映射, $\displaystyle f$ 是ReLU激活函数。基于上式,我们求得从浅层 $\displaystyle l$ 到深层 $\displaystyle L$ 的学习特征为:
利用链式规则,可以求得反向过程的梯度:

式子的第一个因子表示的损失函数到达 $\displaystyle L$ 的梯度,小括号中的1表明短路机制可以无损地传播梯度,而另外一项残差梯度则需要经过带weights的层,梯度不是直接传递过来的。残差梯度不会那么巧全为-1,而且就算其比较小,有1的存在也不会导致梯度消失。所以残差学习会更容易。要注意上面的推导并不是严格的证明。
ResNet的网络结构
ResNet网络是参考了VGG19网络,在其基础上进行了修改,并通过短路机制加入了残差单元,如图5所示。变化主要体现在ResNet直接使用stride=2的卷积做下采样,并且用global average pool层替换了全连接层。ResNet的一个重要设计原则是:当feature map大小降低一半时,feature map的数量增加一倍,这保持了网络层的复杂度。从图5中可以看到,ResNet相比普通网络每两层间增加了短路机制,这就形成了残差学习,其中虚线表示feature map数量发生了改变。图5展示的34-layer的ResNet,还可以构建更深的网络如表1所示。从表中可以看到,对于18-layer和34-layer的ResNet,其进行的两层间的残差学习,当网络更深时,其进行的是三层间的残差学习,三层卷积核分别是1x1,3x3和1x1,一个值得注意的是隐含层的feature map数量是比较小的,并且是输出feature map数量的1/4。
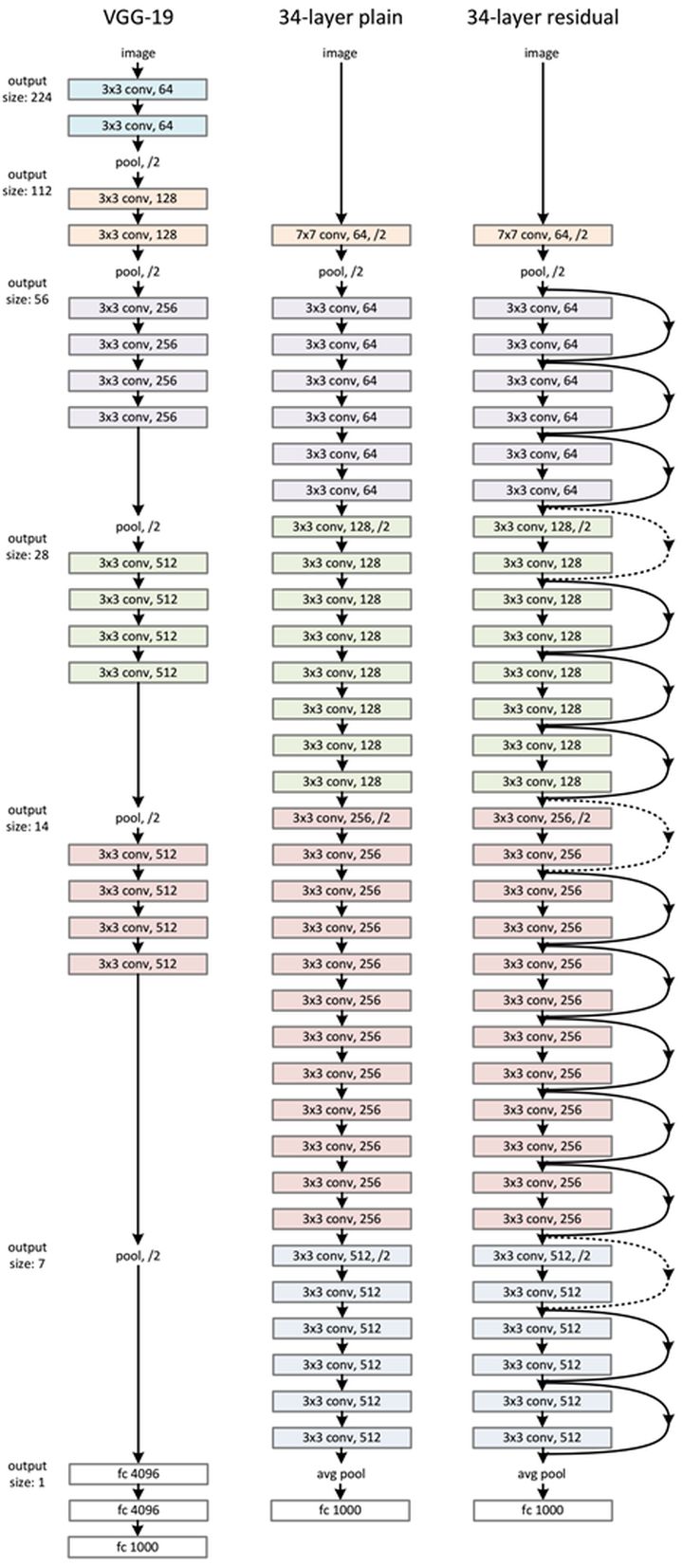
图5 ResNet网络结构图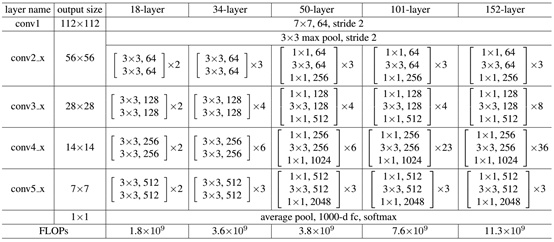
表1 不同深度的ResNet
下面我们再分析一下残差单元,ResNet使用两种残差单元,如图6所示。左图对应的是浅层网络,而右图对应的是深层网络。对于短路连接,当输入和输出维度一致时,可以直接将输入加到输出上。但是当维度不一致时(对应的是维度增加一倍),这就不能直接相加。有两种策略:(1)采用zero-padding增加维度,此时一般要先做一个downsamp,可以采用strde=2的pooling,这样不会增加参数;(2)采用新的映射(projection shortcut),一般采用1x1的卷积,这样会增加参数,也会增加计算量。短路连接除了直接使用恒等映射,当然都可以采用projection shortcut。
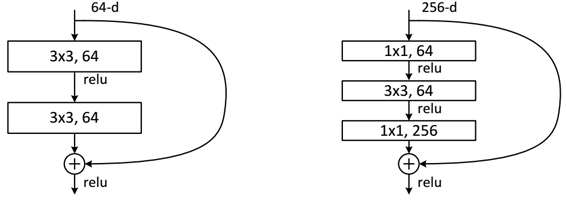
图6 不同的残差单元
作者对比18-layer和34-layer的网络效果,如图7所示。可以看到普通的网络出现退化现象,但是ResNet很好的解决了退化问题。
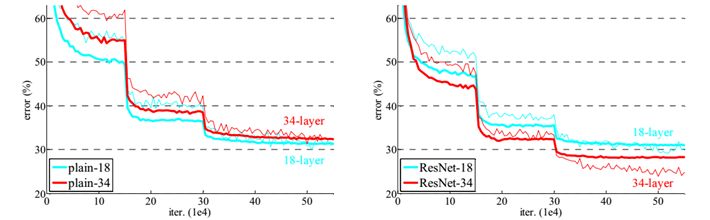
图7 18-layer和34-layer的网络效果
最后展示一下ResNet网络与其他网络在ImageNet上的对比结果,如表2所示。可以看到ResNet-152其误差降到了4.49%,当采用集成模型后,误差可以降到3.57%。
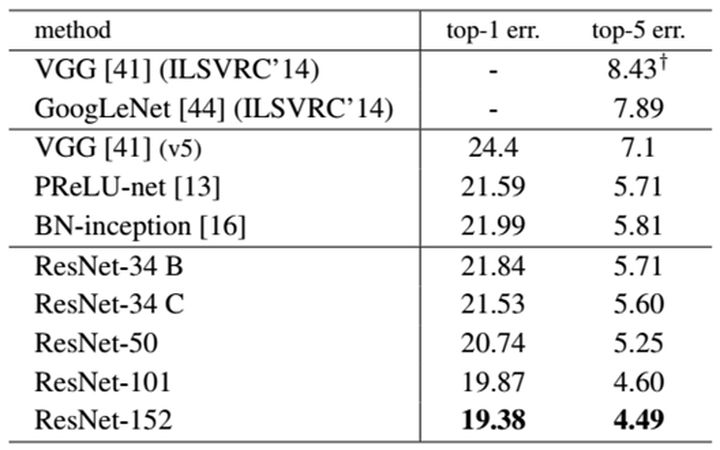
表2 ResNet与其他网络的对比结果
说一点关于残差单元题外话,上面我们说到了短路连接的几种处理方式,其实作者在 文献[2]
中又对不同的残差单元做了细致的分析与实验,这里我们直接抛出最优的残差结构,如图8所示。改进前后一个明显的变化是采用pre-
activation,BN和ReLU都提前了。而且作者推荐短路连接采用恒等变换,这样保证短路连接不会有阻碍。感兴趣的可以去读读这篇文章。
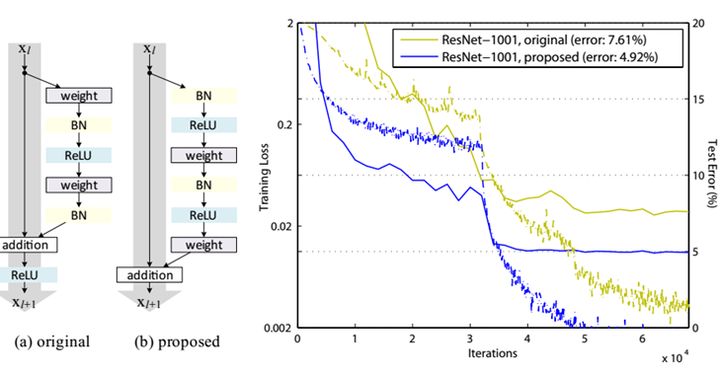 图8
图8
改进后的残差单元及效果
ResNet的TensorFlow实现
这里给出ResNet50的TensorFlow实现,模型的实现参考了 Caffe版本 的实现,核心代码如下:
class ResNet50(object):
def __init__(self, inputs, num_classes=1000, is_training=True,
scope="resnet50"):
self.inputs =inputs
self.is_training = is_training
self.num_classes = num_classes
with tf.variable_scope(scope):
# construct the model
net = conv2d(inputs, 64, 7, 2, scope="conv1") # -> [batch, 112, 112, 64]
net = tf.nn.relu(batch_norm(net, is_training=self.is_training, scope="bn1"))
net = max_pool(net, 3, 2, scope="maxpool1") # -> [batch, 56, 56, 64]
net = self._block(net, 256, 3, init_stride=1, is_training=self.is_training,
scope="block2") # -> [batch, 56, 56, 256]
net = self._block(net, 512, 4, is_training=self.is_training, scope="block3")
# -> [batch, 28, 28, 512]
net = self._block(net, 1024, 6, is_training=self.is_training, scope="block4")
# -> [batch, 14, 14, 1024]
net = self._block(net, 2048, 3, is_training=self.is_training, scope="block5")
# -> [batch, 7, 7, 2048]
net = avg_pool(net, 7, scope="avgpool5") # -> [batch, 1, 1, 2048]
net = tf.squeeze(net, [1, 2], name="SpatialSqueeze") # -> [batch, 2048]
self.logits = fc(net, self.num_classes, "fc6") # -> [batch, num_classes]
self.predictions = tf.nn.softmax(self.logits)
def _block(self, x, n_out, n, init_stride=2, is_training=True, scope="block"):
with tf.variable_scope(scope):
h_out = n_out // 4
out = self._bottleneck(x, h_out, n_out, stride=init_stride,
is_training=is_training, scope="bottlencek1")
for i in range(1, n):
out = self._bottleneck(out, h_out, n_out, is_training=is_training,
scope=("bottlencek%s" % (i + 1)))
return out
def _bottleneck(self, x, h_out, n_out, stride=None, is_training=True, scope="bottleneck"):
""" A residual bottleneck unit"""
n_in = x.get_shape()[-1]
if stride is None:
stride = 1 if n_in == n_out else 2
with tf.variable_scope(scope):
h = conv2d(x, h_out, 1, stride=stride, scope="conv_1")
h = batch_norm(h, is_training=is_training, scope="bn_1")
h = tf.nn.relu(h)
h = conv2d(h, h_out, 3, stride=1, scope="conv_2")
h = batch_norm(h, is_training=is_training, scope="bn_2")
h = tf.nn.relu(h)
h = conv2d(h, n_out, 1, stride=1, scope="conv_3")
h = batch_norm(h, is_training=is_training, scope="bn_3")
if n_in != n_out:
shortcut = conv2d(x, n_out, 1, stride=stride, scope="conv_4")
shortcut = batch_norm(shortcut, is_training=is_training, scope="bn_4")
else:
shortcut = x
return tf.nn.relu(shortcut + h)
完整实现可以参见 GitHub
。